- Дом
- О нас
- Продукты
- Растворы
- Технический центр
- Новости
- Свяжитесь с нами
 |




| Количество: | |
|---|---|
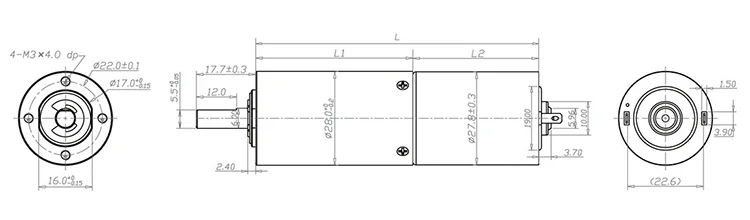
ZWBMD028028
Ritscher
Бесщеточный двигатель-это высокоэффективный электродвигатель с низким уровнем обслуживания. Его основной принцип работы - заменить механическую коммутацию традиционных бесщеточных электронных двигателей на электронную коммутацию. Бесщеточные двигатели обычно состоят из нескольких катушек (также называемых обмотками статора) и постоянных магнитных роторов. Эти катушки должны быть включены и отменены в определенной последовательности синхронизации, чтобы генерировать вращающееся магнитное поле, чтобы привести к вращению ротора. В приводной цепи бесщеточного двигателя транзисторы (такие как MOSFET или IGBT) или другие электронные коммутационные устройства играют ключевую роль. Они несут ответственность за точное управление состоянием включения и за его пределами каждой катушки. Сигнал модуляции ширины импульса (ШИМ) используется для регулировки времени включения и выключения этих переключающих устройств, тем самым достигая мелкого контроля скорости двигателя, крутящего момента и энергоэффективности.
Статор бесщеточного электронного двигателя обычно состоит из трех или более групп катушек, которые расположены в соединении звездного (Y -типа) или треугольника (тип Δ). Каждая группа катушек распределяется под определенным углом в пространстве (например, каждая группа катушек в трехфазном бесщеточном двигателе находится на расстоянии 120 градусов), чтобы гарантировать, что магнитное поле может вращаться равномерно. Ротор состоит из постоянных магнитов (таких как неодимийские магниты), а его количество полюсов соответствует изменению магнитного поля катушек статора.
Работа бесщеточной электроники зависит от электронной коммутации, которая состоит в том, чтобы активировать и деактивировать катушки в определенном порядке через внешние цепи. Например, в трехфазном бесщеточном двигателе приводная цепь будет включать трифазные катушки A, B и C последовательно для генерации вращающегося магнитного поля. Этот процесс требует точного управления временем, который обычно реализуется контроллером двигателя (например, ESC, электронный контроллер скорости) или микроконтроллер (MCU). Контроллер определяет следующий набор катушек, которые будут включены в силу на основе положения ротора (определяется датчиками Холла или обнаружением ЭМФ).
В схеме привода транзисторы (такие как n-канальные или P-канальные mosfets) являются основными компонентами. Каждая катушка обычно контролируется одним или несколькими транзисторами с образованием полустака или цепного моста (например, трехфазный полный мост). Включенные и выключенные состояния транзисторов непосредственно определяют, являются ли катушки под напряжением. Например, в трехфазном приводе полного моста транзисторы верхних и нижних рук должны работать парами, чтобы избежать коротких замыканий и обеспечить однонаправленный поток тока.
Сигнал ШИМ контролирует эффективное время проводимости транзистора путем регулировки рабочего цикла. Чем выше рабочее цикл, тем больше среднее напряжение и ток катушки, что генерирует более сильное магнитное поле, а также увеличивается крутящий момент мотора и скорость. Частота ШИМ обычно высока (от нескольких тысяч герц до десятков килохерца), чтобы избежать слышимого шума и повысить точность контроля. Кроме того, PWM также может использоваться для реализации таких функций, как мягкое запуск, динамическое торможение и восстановление энергии.
Современные бесщеточные моторные приводы обычно используют передовые алгоритмы управления, такие как синусоидальный привод (FOC, полевый контроль) или трапециевидное волновое привод (трапециевидная коммутация). Эти алгоритмы уменьшают пульсацию и шум крутящего момента и повышают энергоэффективность путем оптимизации форм волн ШИМ и времени коммутации. Например, FOC реализует векторный контроль над магнитным полем, разлагая ток на компоненты генерации магнитного поля и компоненты генерации крутящего момента, что делает двигатель более гладким и эффективным.